Quickstart
Start programming robots with the Wandelbots NOVA VS Code extension directly in Visual Studio Code. The extension is a good entry point to get familiar with software development and robotic programming.
Prerequisites
You completed the Wandelbots NOVA quickstart guide and have a NOVA cloud instance running including a robot.
Install Visual Studio Code
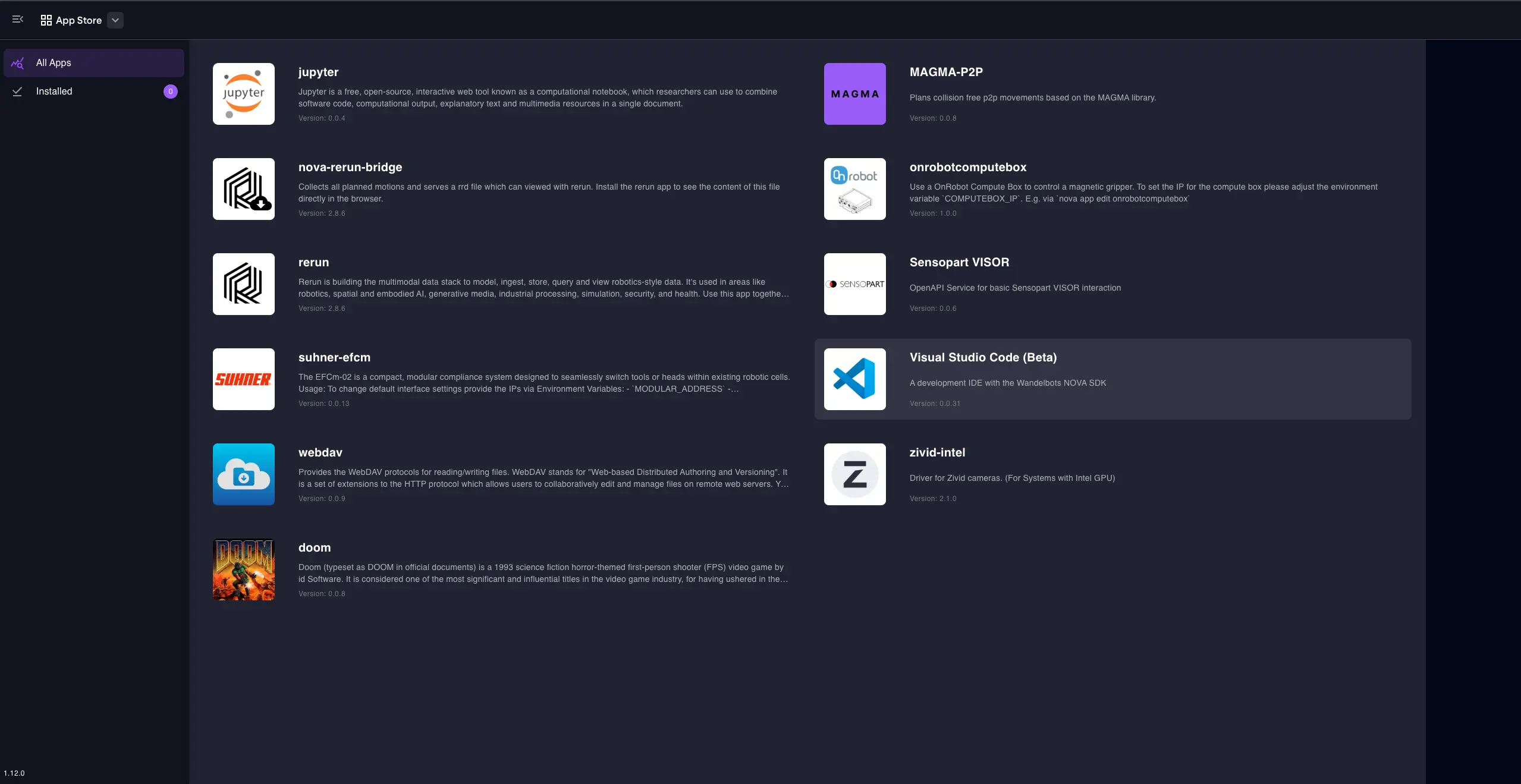
- On the NOVA instance home screen, open the app store.
- Search for “Visual Studio Code”. The results will display the Visual Studio Code app.
- Install Visual Studio Code.
The installation usually takes 3-5 minutes. This is a good time to grab a beverage! ☕
Start Visual Studio Code
- On NOVA home screen, open the Visual Studio Code.
- In the left sidebar (Explorer), select the file named
start_here.py.
This file is a ready-to-run example — your first robot program. - Scan the file to get a first idea of its structure and content:
Program structure with Python
Wandelbots NOVA robot programs use regular Python code with the decorator @nova.program that marks them as NOVA robotics program.
The decorator supports the following parameters:
id: This is the id of your program. It should not contain any spaces or special characters. If you do not provide one, the program name will be used as id.name: This is a free text for you to give readable names to your programs.viewer: This enables the rerun visualization for your program.preconditions: This is where you add robot controllers. The robot program depends on the controllers set there.
@nova.program(
id="my_first_nova_program",
name="My First Robot Program With NOVA",
viewer=nova.viewers.Rerun(),
preconditions=ProgramPreconditions(
controllers=[
virtual_controller(
name="ur10e",
manufacturer=api.models.Manufacturer.UNIVERSALROBOTS,
type=api.models.VirtualControllerTypes.UNIVERSALROBOTS_MINUS_UR10E,
)
],
),
)
async def main():
...Run a robot program
- Use to run the program.
OR
- Use
Start programto run the specific program block.
Once the program has loaded, the rerun visualization including the paths planned in the program are displayed.
Congratulations, you executed the robot program!
Further steps
Did you notice the robot visualization in the video above? This is the rerun viewer that allows you to visualize the robot paths planned in your program. Learn how to set it up in the Rerun visualization documentation.