Simulate with NVIDIA Isaac Sim™
Wandelbots NOVA allows you to connect your NVIDIA Isaac Sim™ instance with your Wandelbots NOVA instance via the Robot Pad.
You'll be able to move a simulated and physical robot, test path-generating algorithms and program robotic code with Wandelscript.
To simulate like a pro, we've drawn out a roadmap for you to follow. The roadmap consists of multiple steps that guide you through the chapters of "Simulate with NVIDIA Isaac Sim™".
Make yourself familiar with NVIDIA Isaac Sim™
The best way to start simulating with NVIDIA Isaac Sim™ is to get familiar with it. Start by following the official Getting Started Guide (opens in a new tab).
Prepare the simulation environment
Once you feel comfortable with NVIDIA Isaac Sim™, you can start setting up the simulation environment. This includes installing NVIDIA Isaac Sim™ 4.5, and the Wandelbots NOVA Isaac Sim™ extension (previously called Omniservice) from the Developer Portal download center (opens in a new tab) or directly from Wandelbots' GitHub. You can find all installation details in the installation guide with further details on how to enable the extension.
In the download center, you'll also have access to an asset starter pack (opens in a new tab) that you can use to get familiar with NVIDIA Isaac Sim. This folder contains assets, robot, tools and Wandelscripts to help you set up your scene. Refer to our setup guide for more details.
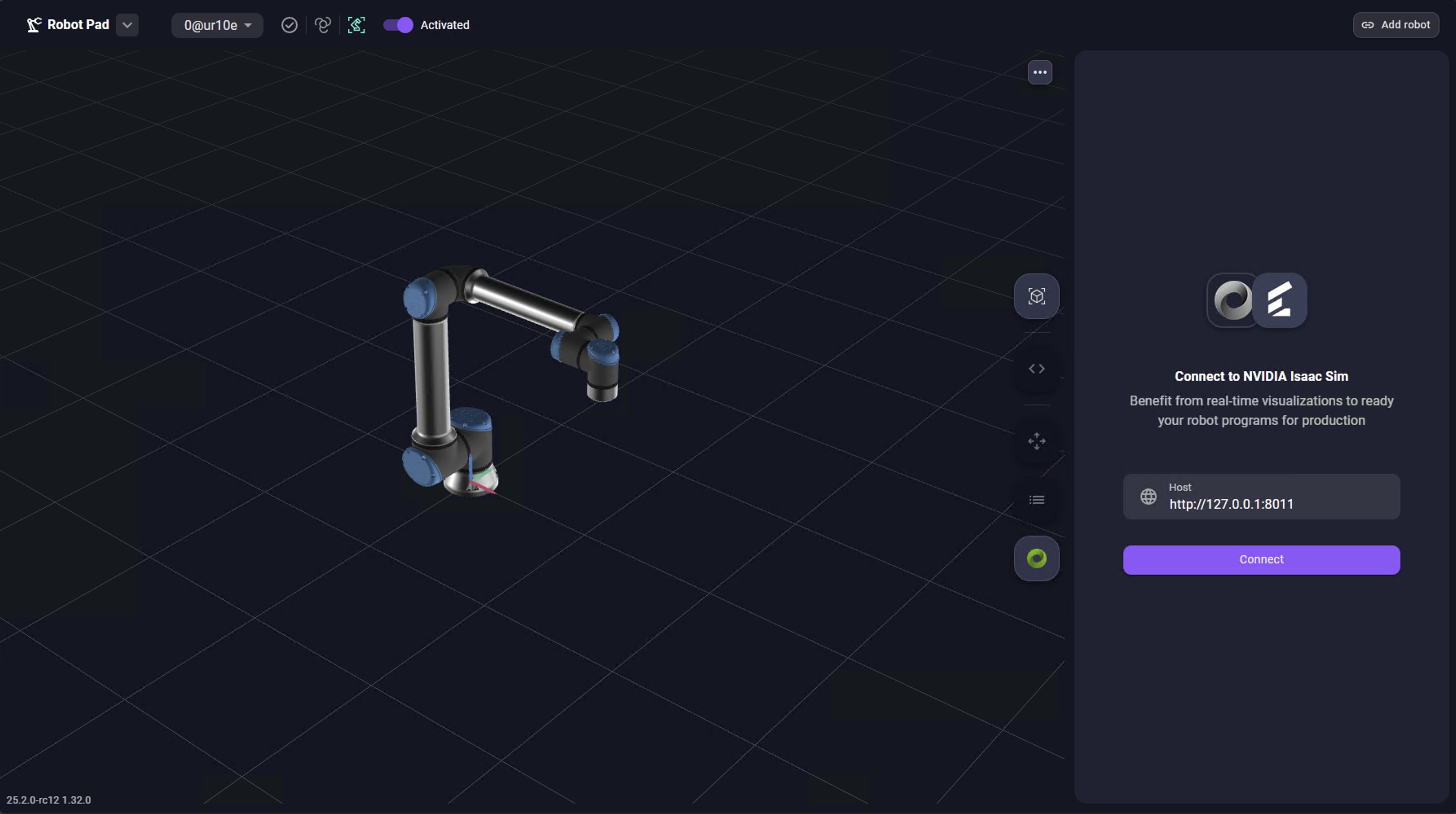
Connect to NVIDIA Isaac Sim™
Now all you need to do is open Robot Pad on your Wandelbots NOVA instance and connect to NVIDIA Isaac Sim™ in the simulation tab (NVIDIA Omniverse™ icon). Use the Omniservice API guide to interact with NVIDIA Isaac Sim™, and start simulating robotic movements with Wandelscript.
Some of your burning questions have been left unanswered? Try out the search function or visit the FAQ page!