Overview, architecture and components
This page provides you with an overview of the Wandelbots NOVA architecture and its components. Knowing the options, you can start working with the components that you're interested in the most.

Have you already spotted the parts of Wandelbots NOVA that you are interested in?
Browse through our component descriptions to get a better understanding of what each part does.
Robot cell
The robot cell is the physical robot cell or the virtual representation of the physical robot cell. A robot cell consists of the robot (controller and robot arm), tools and periphery.
Core apps and functions
Wandelbots NOVA comes with a set of core applications and functions.

Robot Pad
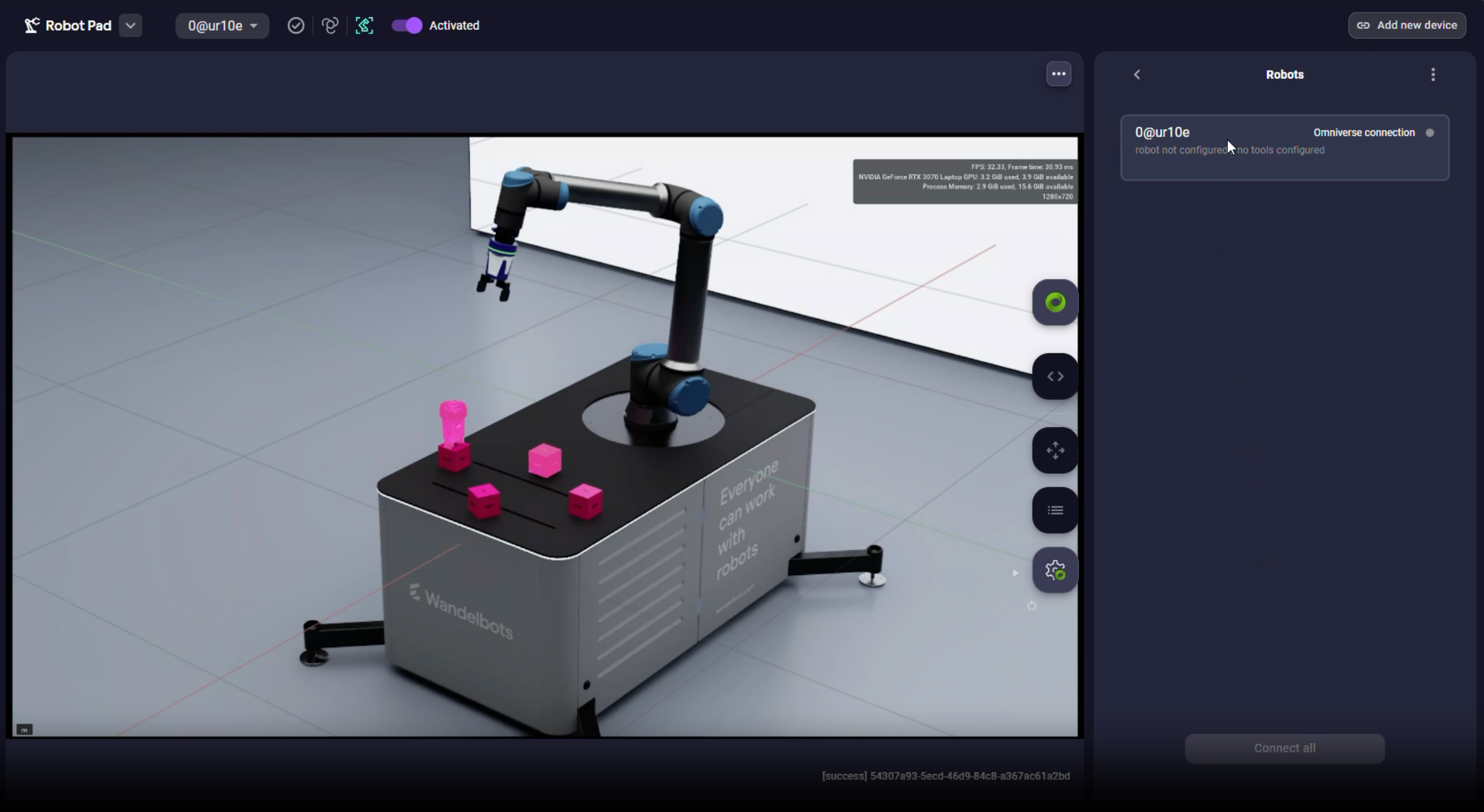
The Robot Pad visualizes the robots added in the settings. It also provides a Wandelscript editor, access to the AI assistant, movement controls, a program library and a connection option to NVIDIA Isaac Sim.
Safety bar
Robot Pad's navigation bar contains safety information about the robot as well as the robot's activation toggle. Hovering over the displayed symbol provides additional information about the robot's safety state and operating mode via a tooltip.
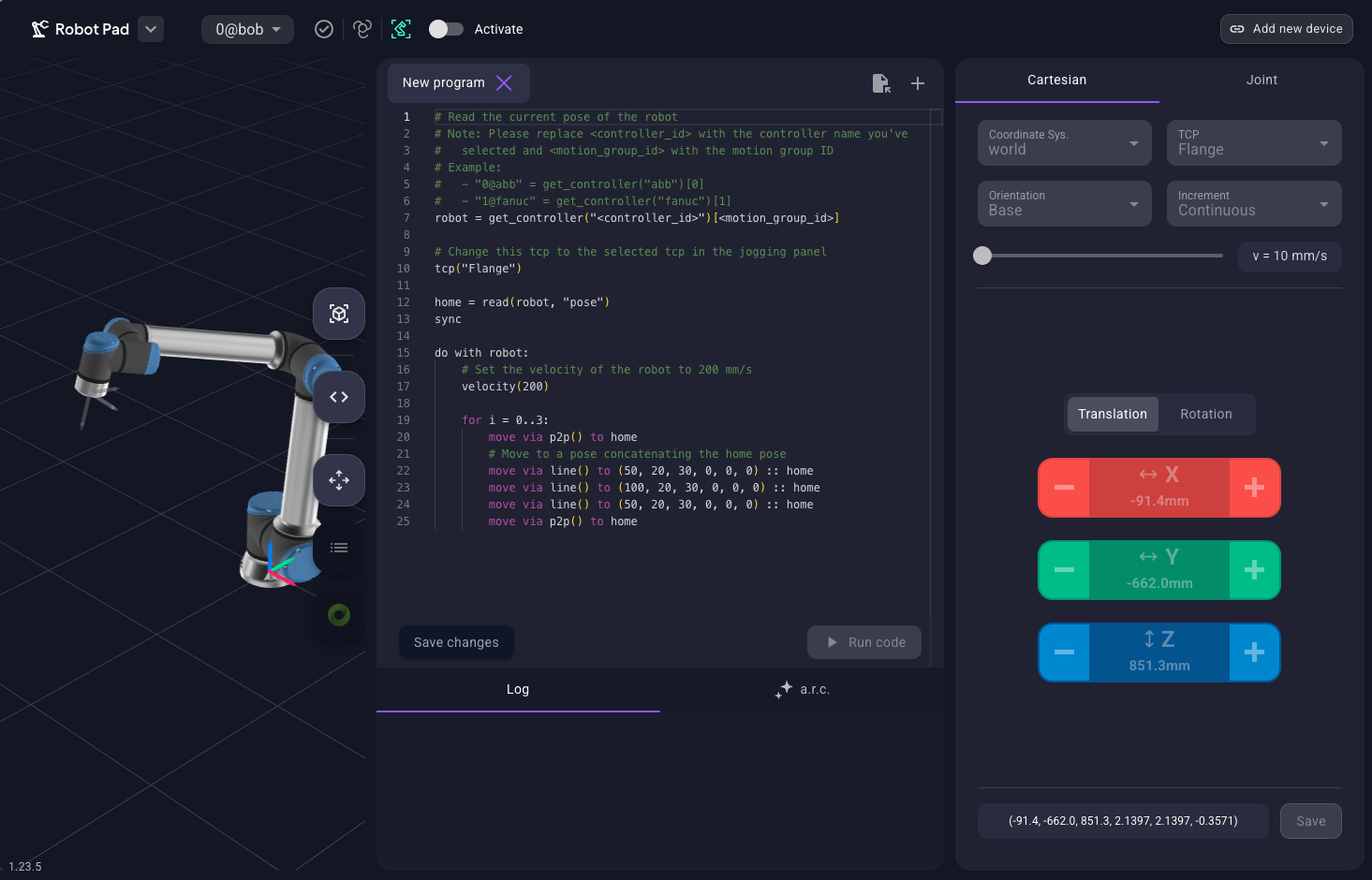

Wandelscript
Wandelscript is our robot programming language. It focuses on ease of use.
This is one way to control a robot, especially if you are used to classical robot languages.
Simply write your robot program and send it to our API. Robot Pad offers a built-in code editor, where you focus on writing and don't need to care about the surroundings.
home = (-189, -600, 260, 0, -pi, 0)
with tcp("Flange")
for i = 0..5:
move via p2p() to home
move via line() to (50, 20, 30, 0, 0, 0.3) :: home
move via line() to (150, 20, 30, 0, 0, 0.3) :: home
move via line() to (50, 20, 30, 0, 0, 0.3) :: home
move via p2p() to homeVirtual robot
If you don't have a physical robot setup at hand but still want to develop an app or demo a use case, you can add a virtual robot to your cell. The virtual robot represents a physical robot in its functionalites and behavior.
Wandelbots NOVA API
All communication with Wandelbots NOVA occur via the Wandelbots NOVA API. It makes communicating to all underlying Wandelbots components, Robot movement, calculation & control, data storage, diagnosis collector and the program engine, possible.
The home screen includes an app where you can access all available API endpoints.
Omniservice API
The Omniservice API is available once you've connected to NVIDIA Isaac Sim. This API allows you to communicate with NVIDIA Isaac Sim™ and simulate robotic cells, and deploy robot programs to your simulated cell.
Custom apps
Once you familiarized yourself with whats possible, you might want to dive into developing your own applications. You can call the NOVA REST API directly or use our TypeScript or python package.
App store
Manage your custom apps in the app store, publish device integrations and make them available to other NOVA users.
The app store ist available via the home screen.
Integrated software
NVIDIA Isaac Sim™
Connect Wandelbots NOVA to NVIDIA Isaac Sim™ in Robot Pad. Simulate robotic cells to quality-test your setup and deploy tested robot programs to physical cells.
realvirtual
Wandelbots NOVA is part of realvirtual's Unity offering. More information on Wandelbots NOVA x realvirtual in realvirtual's documentation (opens in a new tab).