FAQ
The FAQ includes all currently known questions arising when using Wandelbots NOVA as well as a proposal to resolve the issue. Wandelbots GmbH cannot be held liable for executing these proposals.
Which browsers are supported by Wandelbots NOVA?
Wandelbots NOVA is currently compatible with the following browsers:
- Google Chrome
- Mozilla Firefox
- Microsoft Edge
- Brave
How do I update Wandelbots NOVA?
- Open the settings on your instance.
- Go to "Import/Export".
- Export the current configuration within the section and save the configuration file on your personal computer.
Only configuration files from robots that have been activated in the Robot Pad can be exported.
- Go to "System".
- Click on "Update". The system will check for available updates. If there is an update available, it will be automatically downloaded and installed. Current configurations as well as coordinate systems will get lost.
- Import the configuration file you saved in step 3.
- Add the coordinate systems via the Wandelbots NOVA API.
Where do I find my physical instance/IPC's IP address?
- Connect a screen and keyboard to the IPC. Alternatively, you can connect your personal computer to the same WiFi that the IPC is connected to.
- Turn the IPC on. (A terminal should pop up automatically.)
- Log in with the credentials configured during the installation.
- Enter
ip a. - Select the IP address that is listed under the network port chosen during setup. This network port is usually enp3s0 (LAN1).
My physical instance/IPC's is physically connected to the robot but the robot is not moving.
Ensure that the IPC's IP address and the robot's IP address are within the same subnet. Ensure that the IPC port used to connect to the robot is active in the network settings.
- Connect a screen and keyboard to the IPC. Alternatively, you can connect your personal computer to the same WiFi that the IPC is connected to.
- Open
http://<instance's IP address>:9090in your browser's URL. - Log in with the user credentials created during setup or provided by Wandelbots GmbH.
- Activate the Administrator Mode.
- Open the network settings and change the network settings to enp3s0 (LAN1).
- Connect the robot to the IPC via the LAN1 port.
How can I avoid singularities?
If your robot is constantly running into singularities, there are a few things you can try to avoid them.
In general, remedies for singularities depend on the robot's geometries and model, and mounting position.
The following tips can help you avoid singularities, but are not guaranteed to work for every robot model:
- Depending on the mounting, you can use
joint_p2pmovements instead of cartesian poses as support points to ensure that the robot has a wider range of movement. In this example, the robot was mounted on the wall and usingjoint_p2pmovements helped to avoid singularities.PLACE_1 = (452.2, -12.1, 132, 3.1, 0.0, 0.0) HOME_J = (1.3950, 0.6053, 0.3194, 0.0089, 0.6564, 1.3092) do with ur10e[0]: move tcp via p2p() to PLACE_1 :: (0, 0, -50, 0, 0, 0) move tcp via p2p() to (0, -200, 0, 0, 0, 0) :: SCANNER move tcp via joint_p2p() to HOME_J move tcp via p2p() to PICK_1 :: (0, 0, -50, 0, 0, 0) move tcp via p2p() to PICK_1 :: (0, 0, -5, 0, 0, 0) with velocity(50) ur10e_open_gripper() - Using
p2pmovements helps to avoid singularities. Of course, this also comes with the drawback that the anticipated line or circle movement might no longer be followed.PLACE_1 = (452.2, -12.1, 132, 3.1, 0.0, 0.0) HOME_J = (1.3950, 0.6053, 0.3194, 0.0089, 0.6564, 1.3092) do with ur10e[0]: move tcp via p2p() to PLACE_1 :: (0, 0, -50, 0, 0, 0) move tcp via line() to PLACE_1 with velocity(50) ur10e_open_gripper() - Lines and circles are rather restrictive for the robot's movement. So use them only when absolutely necessary for the process.
- Mount tools at an angle (~30 degrees) so that the tool's TCP z axis is not within nor parallel to the flange's z axis, especially for symmetrical tools. This minimizes running into singularities.
Some robot manufacturers provide additional information on how to avoid singularities in their online documentation, here's an article from UR (opens in a new tab) on the topic.
Does Wandelbots NOVA impact robot controller safety functions?
No.
Wandelbots NOVA does not replace or interfere with robot controller safety functions. Safety functions will operate the same way, whether or not Wandelbots NOVA is in use.
Robots (both cobots and industrial) will remain compliant with safety standards, provided they were compliant before using Wandelbots NOVA.
Safety functions may affect path execution, e.g. if limits on Wandelbots NOVA differ from safety settings:
- The path may not be executed at all,
- The robot may deviate from the planned path,
- If the deviation is too large, safety functions like a protective stop may activate and the robot stops moving.
For questions on safety compliance, contact Wandelbots Customer Support.
Developer Portal
How do I provide feedback?
To provide feedback via the Developer Portal, the system mail client must be configured on your personal computer.
Click on the feedback button in the Developer Portal and fill out the feedback form.
I want to create a third instance. Why is the "Create" button greyed out?
Only 2 cloud instances can be created per user. If you need another cloud instances, delete one of your existing instances.
My instance is gone. What happened?
Instances have a limited lifetime which is displayed in the Developer Portal in the respective instance panel.
They are automatically deleted after 14 days since the last start. If you want to keep an instance for another 14 days, click on the Extend button within the respective instance panel.
We also recommend to regularly export your configuration to avoid data loss.
When do my instances expire?
Instances stop after 3 days since the last start and expire after 10 days since the last start.
Settings app
What can I add to a cell?
- Robot: Add a virtual or physical robot to the cell.
Learn how to establish communication to an OPC UA server.
RobotPad
Why is the robot displayed beneath the plane in 3D view?
The displayed grid represents the zero plane of the coordinate system.
Which functions does a.r.c. currently have?
The Wandelbots NOVA AI assistant currently has the following functionalities:
- History support: Previous questions and answers of the session are taken into account.
- Code editor awareness: Answers can refer to the code that is currently within the code editor.
- Wandelscript dataset: Large and annotated Wandelscript dataset is used to give Wandelscript examples.
- Upvote & Downvote function: Let us know if a.r.c. provided helpful feedback!
- Performance: We use ChatGPT-4o as a Backend to provide fast responses and the highest quality.
- Links to documentation: a.r.c. provides the main source (if available) used to generate the answer.
- Data collection: Questions, answers, feedback and the code editor content is collected in AzureCosmosDB.
Execute program button shows endless program execution. How do I stop the execution?
When you run a program in the code editor, the Execute program button might display a continuous loading spinner. You're not able to stop the program via the Stop button. The robot is not necessarily moving.
This is how you can reset the program execution:
- In case you have configured custom TCPs, coordinate systems, etc., export your configuration.
- Restart your instance to restart the program runners responsible for executing the program. If you exported your configuration, import it again. Try to run the code again.
- If the problem persists, please contact Customer Support.
API
I can't find IOs with Virtual robot > Get I/O
The endpoint Virtual robot > Get I/O does not work for Yaskawa and ABB robots.
This is caused by the special characters that Yaskawa and ABB use in their IO names.
Use Controller I/Os > List Descriptions to successfully get Yaskawa and ABB I/Os.
Error message: <Status.FAILED_PRECONDITION>
You connected your physical cell to Wandelbots NOVA and tried to run a Wandelscript program.
The error message <Status.FAILED_PRECONDITION> failed enable position control while trying to conrtol the robot, the robot shows an operation or safety state that does not allow active controlling. Manual user interaction with the physical robot is required. is displayed.
- Check that the robot is in the correct operating state by referring to the robot setup instructions.
- Use Controller > State of Device
GET /api/v1/cells/{cell}/controllers/{controller}/stateis in the desired state. - Use Motion Group Infos > State of Device
GET /api/v1/cells/{cell}/motion-groups/{motion-group}/stateto check if the robot is in the correct state. Likely, the following error will be displayed:Tried to claim mode 'ROBOT_MODE_MONITOR' for '$(something here)$' but already in Use. - The solution to this is to restart the Kubernetes pod for the robot movement calculation & control service. Restart your instance and try again. If the problem persists, restart the robot and try again.
Wandelbots NOVA x NVIDIA Isaac Sim™
Which NVIDIA Isaac Sim™ version is Wandelbots NOVA 25.2 compatible with?
| Wandelbots NOVA | Omniservice | NVIDIA Isaac Sim™ |
|---|---|---|
| 25.2 | 1.43.5 | 4.5, 4.2, 4.1, 4.0, 2023.1.1 |
Wandelbots NOVA 25.2 requires Isaac Sim™ extension version 1.43.5 which is currently compatible with NVIDIA Isaac Sim™ version 4.5, 4.2, 4.1, 4.0 and 2023.1.1.
I cannot connect to NVIDIA Isaac Sim™ from Robot Pad. What can I do?
-
Ensure that the Wandelbots NOVA extension is installed and running. If the viewport is not automatically displayed, click on the 3D view icon and select the NVIDIA Omniverse™ icon.
-
Ensure that you're using the correct port.
Open the Wandelbots NOVA menu in NVIDIA Isaac Sim™ and open the Omniservice API.
A tab in a browser with the Omniservice API opens.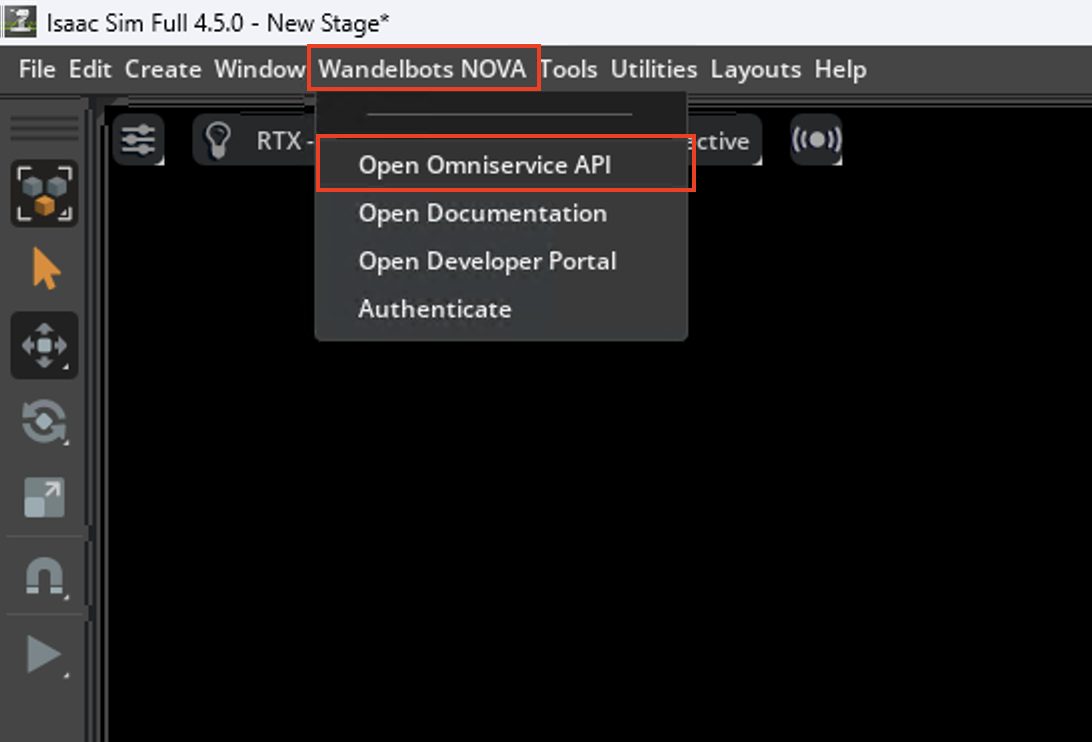
The required port is displayed in the URL after the colon, e.g.
8011.Add the displayed port number to the NVIDIA Isaac Sim™ instance's IP address, e.g.
http://127.0.0.1:8011.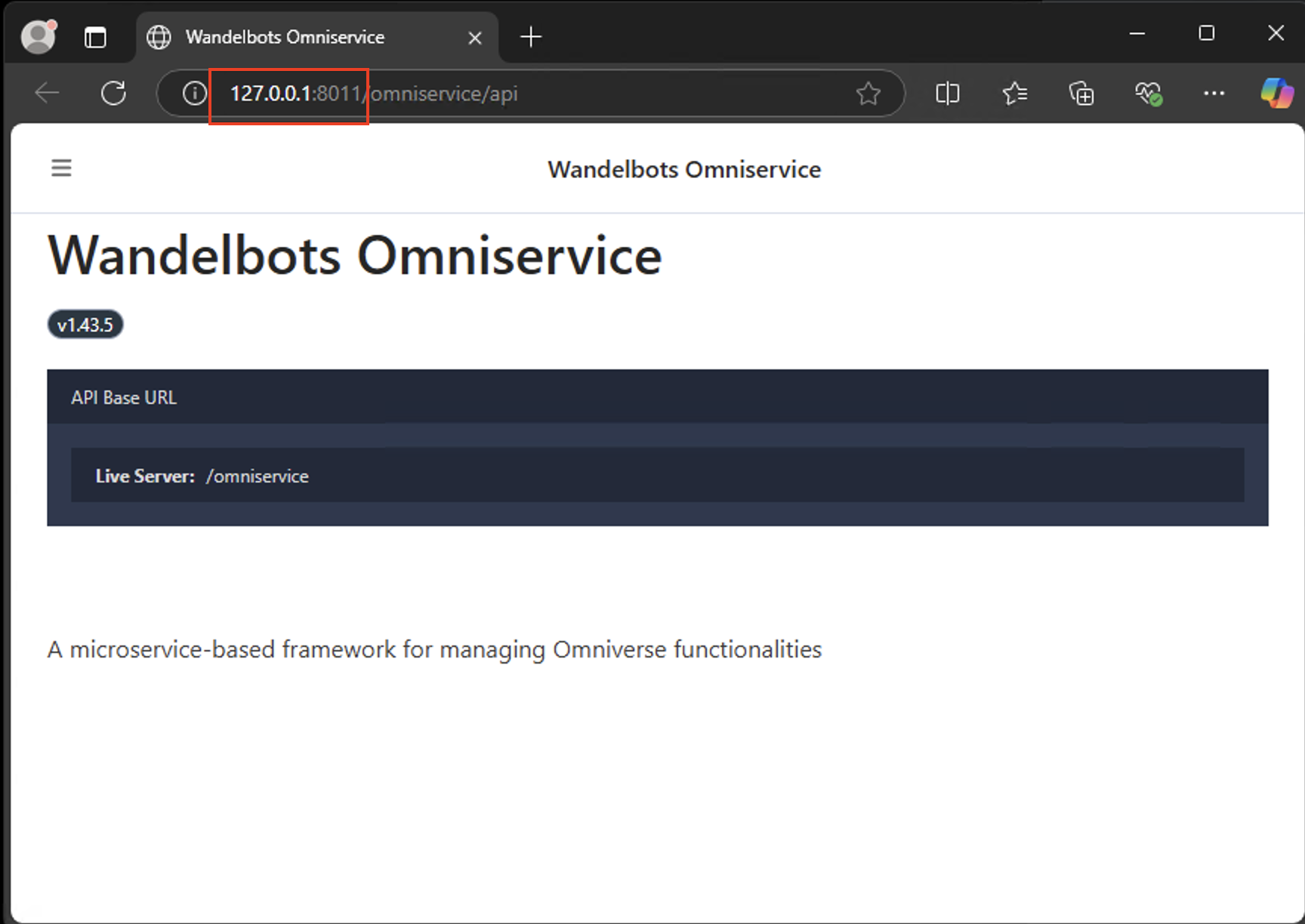
Where do I get the missing .dll files for NVIDIA Isaac Sim™ from?
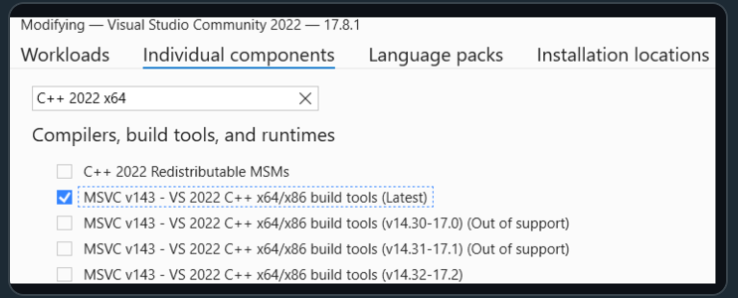
On Windows, missing .dll files in the pytorch tool package cause issues when using Isaac Sim. Here's the workaround:
- Download the VS Build Tools (opens in a new tab).
- During installation, check the checkbox
MSVC v143 - VS 2022 C++ x64/x86 build tools (Latest)as displayed in the screenshot.
This will add the missing .dll files.
How do I display an object's coordinate system in NVIDIA Isaac Sim™?
Objects visualized in Isaac Sim™ each have a coordinate system that movements, positions and orientation configurations are referring to.
- In the stage tab, click on the desired object to display the object's coordinate system.
Why is the 3D switch option for the viewport not available in Robot Pad?
If the button with the NVIDIA Omniverse™ icon in Robot Pad that enables switching from the robot visualization to the simulated scene is not available, NVIDIA Isaac Sim™ was not started in streaming mode.
In order to change your NVIDIA Isaac Sim™ instance to streaming you can activate the extension omni.kit.livestream.webrtc.
Otherwise check out how to start NVIDIA Isaac Sim™ in streaming mode.
FANUC
All error messages are listed in the original Fanuc alarm code instructions.
FANUC displays error 640091152 after establishing RMI connection.
I've established an RMI connection. After the connection was established, the robot displays an error message 640091152.
- Reboot the robot controller.
Robot movement was interrupted due to error SYST-322.
Likely, the DCS Auto Status Check is disabled. Enable the DCS Auto Status Check to avoid the error SYST-322.
- MENU button → 0/NEXT → SYSTEM → DCS → Collaborative Robot → Auto Status Check → Check during moving → Enable with ENABLE.
FANUC displays error APSH-155 and cannot find the home position.
The home position likely wasn't saved.
- Define a home position with "is a valid HOME". This reference position is not used during operation but resolves the issue.
After setting the payload, I get an SRVO-480 error.
The payload setting is likely erronous.
- Correct the payload setting.
UR
Connection from robot controller cannot be established. The robot is not moving.
Option 1: The remote control is not activated on the robot controller.
- Switch on remote control on the robot controller by using the original robot control panel.
Option 2: The IPC's IP address is not within the same subnet as the robot controller.
- Configure the robot controller's IP address and ensure that the IPC's IP address is part of the same subnet. Wandelbots Customer Support is happy to assist you with this!
Yaskawa
Jobs are stalling and job limits are reached when using Wandelbots NOVA.
To run Wandelbots NOVA with a Yaskawa, motoPlus jobs are running. In order for these additional jobs to be running, the limits on the controller must be set as mentioned in the Yaskawa setup instructions.