Viewport
Display the NVIDIA Isaac Sim simulation scene in Robot Pad to facilitate programming. You'll have several settings to configure the viewport to your needs.
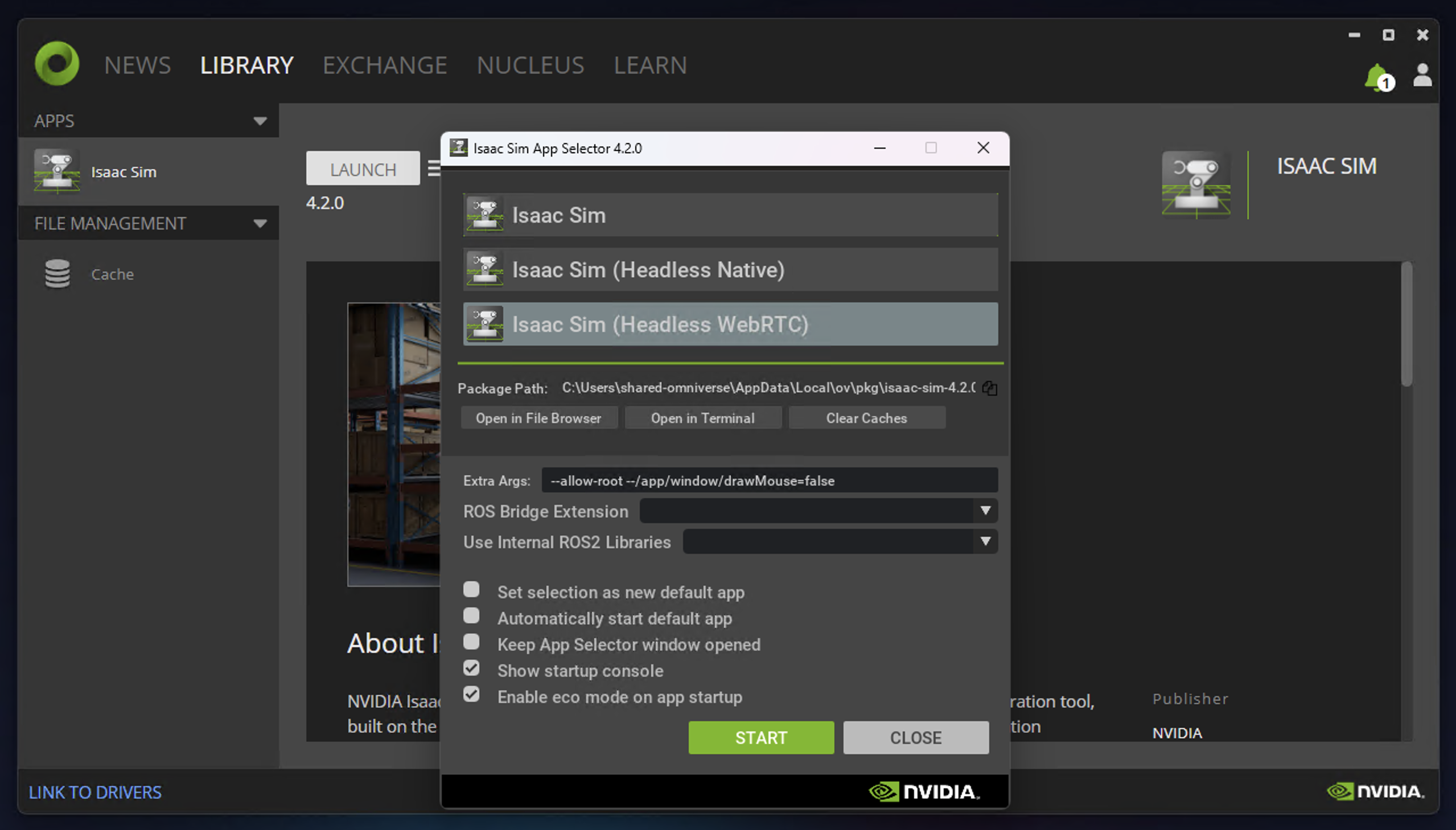
Start Isaac Sim in Headless WebRTC mode
- Open the NVIDIA Isaac Sim Launcher.
- Select Isaac Sim (Headless Mode WebRTC) from the list of available options.
- Add the following launch parameters in the
Extra argsfield:--allow-root --/app/window/drawMouse=false - Click the
Launchbutton to start Isaac Sim in Headless WebRTC mode.
Display scene in Robot Pad
- Open Robot Pad.
- Connect Robot Pad to your NVIDIA Isaac Sim instance. If Robot Pad was previously connected to the instance and you had to restart Isaac Sim in headless mode, you need to reconnect.
- After successful connection, the simulated scene is automatically displayed in the Robot Pad's 3D view. If the scene is not automatically displayed, click on the 3D view icon and select the NVIDIA Isaac Sim icon. The 3D view loads the scene from the connected NVIDIA Isaac Sim instance.
Adjust the display
Open the menu in the upper right corner of the 3D view ....
Available settings are:
| Setting | Description |
|---|---|
| Display/Hide controls | Enables or hides the control elements for Isaac Sim |
| View > Fill window | Fills the whole 3D view with the simulation scene |
| View > Fit to window | Fits the simulation scene to the 3D View |
| Resolution | A selection of different resolutions |
| framerate | A selection of different framerates |